
/* Name : main.c
* Purpose : Source code for Servo Motor Interfacing with AT89C52.
* Author : Gemicates
* Date : 2014-01-19
* Website : www.gemicates.org
* Revision : None
*/
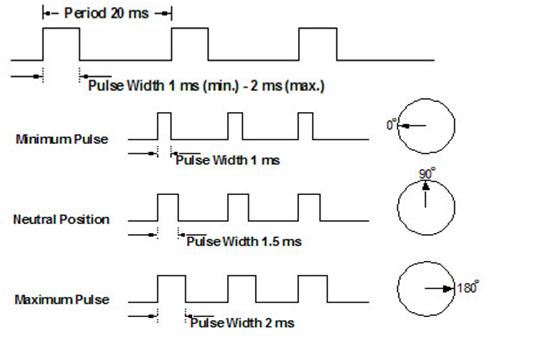
// Program to rotate servo by 5 degree from previous position starting from 0 degree
// 0 degree = 700us
// 180 degree = 5500us
// Timer1 pulse after 50us -23
#include <REGX52.H>
sbit output=P1^0; // Output to motor
int count;
void delay(unsigned int msec) // Function for delay
{
int i,j;
for(i=0;i<msec;i++)
for(j=0;j<1275;j++);
}
void timer(int msec) // Function for timer
{
int i;
TR1=1;
for(i=0;i<msec;i++)
{
while(TF1==0);
TF1=0;
}
TR1=0;
}
void main()
{
int i;
TMOD=0x20; // Mode2
TH1= -23; // 50usec timer
output=0;
count=14;
while(1)
{
if(count>=100)
count=14;
else
count=count+5;
for(i=0;i<200;i++)
{
output=1;
timer(count);
output=0;
timer(360);
}
delay(100);
}
}

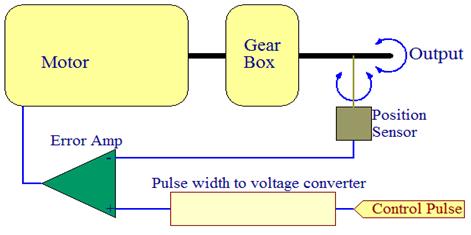
Interfacing of Servo Motor with 8051
